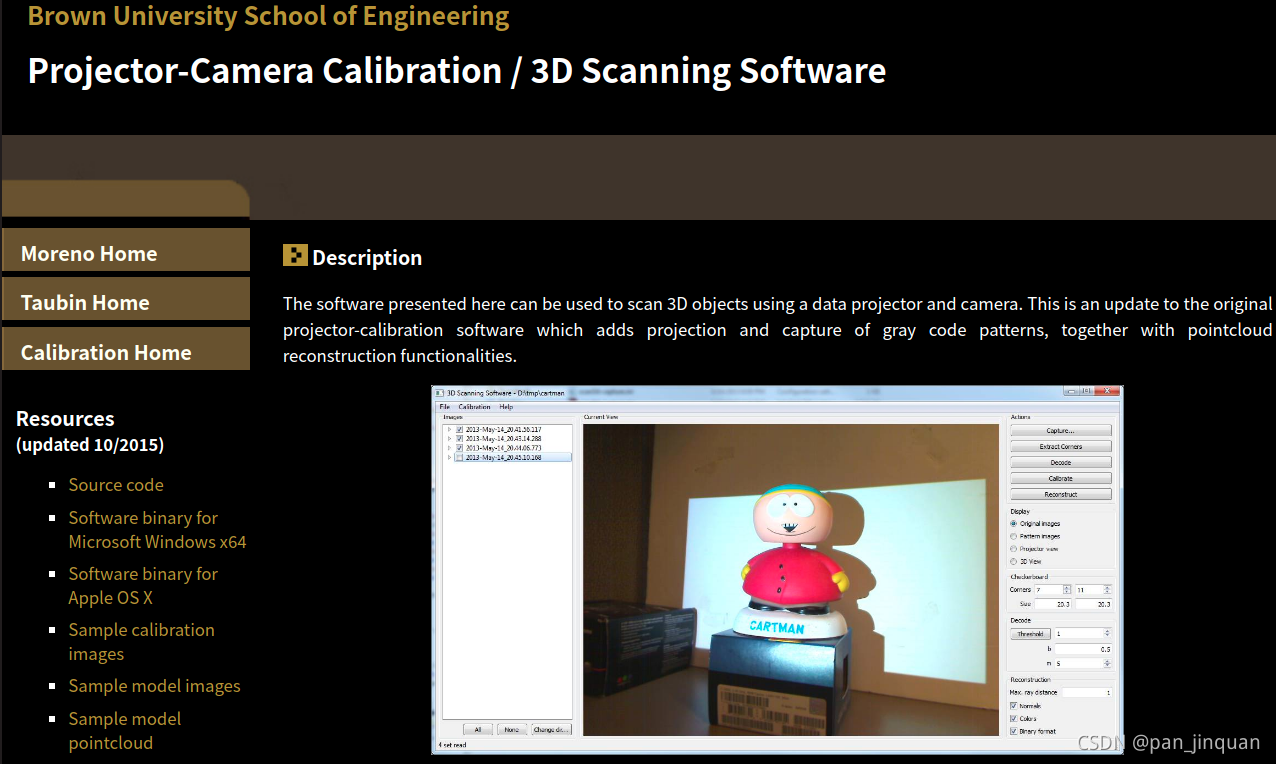
结构光相机标定-3D Scanning Software配置,Projector-Camera Calibration / 3D Scanning Software, 配置教程:https://panjinquan.blog.csdn.net/article/details/121093639, 若编译出现问题,请跟博主反馈哈
”camera camera-calibration point-cloud ros calibration lidar velodyne point-clouds data-fusion ros-kinetic aruco-markers lidar-camera-calibration 3d-points ros-melodic hesai stereo-cameras camera-frame lidar-frame 附件源码 文章源码“ 的搜索结果
使用3D-3D点对应关系的LiDAR相机校准 , ( ,毗湿 南(Vishnu Radhakrishnan),克里希纳(Krishna) ROS封装,用于校准相机和LiDAR。 该软件包用于通过相机校准LiDAR(配置为支持Hesai和Velodyne硬件)(适用于...
80-n5126-1sc_u_camera_module_selection_and_calibration_data
摄像机与激光雷达的外参标定 相机和3D激光雷达之间的外部校准 1,坐标系 2,环境与工具标定板摄像头激光雷达 Visual Studio 2019+opencv matlab PolyWorks 2017 3,流程 ##参考参考 1, 2,2,
基于OpenCV单目相机的快速标定--源码、工程、实现过程 camera_calibration.cpp----相机标定的源码
lidar-camera-calibration-master.zip
JNI-Open-CV-Camera-Calibration JNI Open CV Camera-Calibration
sudo apt install ros-DISTRO-camera-calibration 运行以下命令以在ros_workspace/src目录中克隆lidar_camera_calibration软件包。 cd ~/ros_workspace/src git clone ...
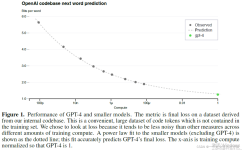
Simple, Accurate, and Robust Projector-Camera Calibration.pdf
常规部分的正向传播由transformers所定义,而LoRA部分的正向传播则由LinearLayer_LoRA(nn.Module)的forward()所定义,即“LoRA层的两条分支结果进行加和”,如下图所示『一般用随机高斯分布初始化,当然实际代码实现...
Camera Calibration with One-Dimensional Objects 张正友的经典标定之二,,,

Android 9 introduces API support for multi-camera devices via a new logical camera device composed of two or more physical camera devices pointing in the same direction. The logical camera device is e...

八. 实战:CUDA-BEVFusion部署分析-环境搭建

A generic camera model and calibration method for conventional, wide-angle, and fish-eye lenses[J]. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 2006, 28(8): 1335-1340
实际ROS视觉SLAM工程落地时,一般搭配传感器实时发出位姿pose的rostopic,本篇就以D435i相机的双目IR相机作为输入,运行ROS版ORB-SLAM2,最后发出pose的rostopic。

简介SWAT-CUP安装及使用




此示例显示如何配置ADC1并读取连接到GPIO引脚的电压。
原项目来自lidar_camera_calibration,修改用于对相机和Robosense LiDAR联合标定。这里会简单写写标定步骤和我遇到的问题,我修改后的包已经放在了github上。


推荐文章
- 大数据和云计算哪个更简单,易学,前景比较好?_大数据和云计算哪个好-程序员宅基地
- python操作剪贴板错误提示:pywintypes.error: (1418, 'GetClipboardData',线程没有打开的剪贴板)...-程序员宅基地
- IOS知识点大集合_ios /xmlib.framework/headers/xmmanager.h:66:32: ex-程序员宅基地
- Android Studio —— 界面切换_android studio 左右滑动切换页面-程序员宅基地
- 数据结构(3):java使用数组模拟堆栈-程序员宅基地
- Understand_6.5.1175::New Project Wizard_understand 6.5.1176-程序员宅基地
- 从零开始带你成为MySQL实战优化高手学习笔记(二) Innodb中Buffer Pool的相关知识_mysql_global_status_innodb_buffer_pool_reads-程序员宅基地
- 美化上传文件框(上传图片框)_文件上传框很丑-程序员宅基地
- js简单表格操作_"var str = '<table border=\"5px\"><tr><td>序号</td><-程序员宅基地
- Power BI销售数据分析_powerbi汇总销售人员业绩包括无销售记录的人-程序员宅基地